產品試用

近日,特斯拉與小鵬汽車的創始人又因「抄襲」話題在網絡上隔空喊話,二人頻上熱搜的同時也帶火了一個技術名詞——激光雷達。這已經是該詞匯在今年的第二次網絡熱議。
兩個月前,蘋果公司三大新品發布,其中的主力機型 iPhone12 Pro 就搭載了激光雷達技術,引發眾多網友的硬核討論。而一周后的 10 月 16 日,在 G7 數字貨艙科技日上,我們也正式發布了新一代(快遞快運)智能掛車量方解決方案——數字貨艙量方 2.0——同樣應用了激光雷達技術。

那么,激光雷達到底有何過人之處,讓 Tesla、小鵬汽車、蘋果這些科技公司紛紛使用?G7 作為根植于物流行業的科技公司,為何也要引入這項技術?
先來了解「激光雷達技術」是什么?
激光雷達(Lidar),英文全稱為 Laser Detecting and Ranging,即激光探測和測距。是一種通過測量激光發出和收到回波的時間差,確定目標方位和距離的前沿感知技術。它可探測目標物體的距離、方位、高度、速度、姿態、形狀等參數。因其分辨率高、抗干擾能力強、不受光線影響、體積小質量輕等優勢,主要應用于需要精密測量的智能制造與電子產品領域。


為進一步說明它的作用,我們以激光雷達自動駕駛領域和 iPhone12 Pro 的應用舉例。
iPhone 12 Pro 配備的激光雷達主要用于 AR 增強現實以及影像系統上。激光雷達掃描儀可發射出人眼不可見的激光束,遇到物體時會反射回來,結合光速,可以計算出距離物體的距離。借助這種深度感知能力,蘋果手機可以在暗光環境下,更加快速、精準地對焦,同時識別物體的前后關系,從而完成對被攝物體的精準捕捉與 3D 建模。以同樣的原理,G7 數字貨艙應用的激光雷達在掛車廂體內完成對貨物的精準捕捉與體積測量,從而幫助管理者對廂內空間利用率的監督與把控。

而在自動駕駛領域,激光雷達作為關鍵的傳感器主要用于精準感知道路環境,構建汽車周圍環境的 3D 模型。得益于激光雷達的產品特性,它在極端環境條件下(大雨、大雪、大霧)的夜間或照明不足的場景中仍能運行,可以區分靜止或運動的物體,準確分辨出物體的大小,避免交通事故。
G7 數字貨艙為什么要用激光雷達?
G7 數字貨艙利用激光雷達結構簡單、測量精準度高的特點,將其作為「量方 2.0」的核心技術解決方案,使產品在對于廂車的體積裝載率精準測量的前提下,成本得以大幅下降,而成為一個可以普惠行業的應用。
在新一代的解決方案中,一臺 135 方的掛車,量方所需的傳感器直接從 36 個減少到 1 個,單車的安裝時間下降 87%,綜合物料成本下降 67%


搭載激光雷達的量方 2.0 將適用于哪些場景?
拼車結算
在拼車運輸場景下,運費結算一般按照貨物的體積和重量來計算,通過人工錄入、目測方式往往存在誤差。通過量方 2.0 可以準確獲得貨物的量方數據,從而實現更精準的結算。
配載優化
配載的質量直接影響到運輸成本,在人工測量的情況下,準確性無法保證,優化配載沒有抓手,依靠量方 2.0 可以為優化配載提供數據依據,實現精細化管理。
裝載率提升
在人工現場監督裝卸貨的情況下,因為操作不規范而導致的裝載率低的問題,無法被充分發現,“砌墻”式的裝貨時有發生。通過量方 2.0 可以準確還原裝卸過程,管理人員有的放矢。

有了硬件技術就行了嗎?算法更重要
正如激光雷達技術在自動駕駛與蘋果手機上的不同應用。硬件為掛車的裝載率提升提供了底層能力,但想要充分發揮它的潛力,還需要結合行業特點與應用場景做深入、持久的算法層面的能力升級。
識別搬運過程間隙,數字化還原裝載全過程
為了能夠準確識別出貨物碼放過程中存在的不合理間隙,G7 算法團隊通過「過程還原算法」開發出「動態間隙識別技術」,使系統能夠自動記錄貨物動態搬運過程中激光雷達回收的點云數據和位置信息,通過末端計算與云計算的協同配合,計算出物體之間的間隙數據,實現裝載過程的數字化還原。

全域掃描,長距離成像
面陣式激光雷達系統雖然具備對于目標物體快速、精準掃描成像能力,但因其技術特性,一般只適用于短距離的物體探測,G7 算法團隊針對這一問題,結合全域激光掃描算法,有效解決了距離、精準度之間的矛盾,能夠實現對整個車廂進行精準的 3D 掃描。

G7 數字貨艙的工業級激光雷達感應可對掛車進行長距離感應
修正大角度鏡頭畸變,還原全景真實畫面
使用大角度鏡頭拍攝照片時,一般在圖像邊緣容易發生扭曲變形,這種現象同樣發生在激光雷達的三維成像中。為了實現使用一枚探測器就能可完成對于車廂全景的大角度準確成像,G7 算法團隊通過「鏡頭畸變修正算法」克服了這一難題,實現鏡頭畸變的準確還原。
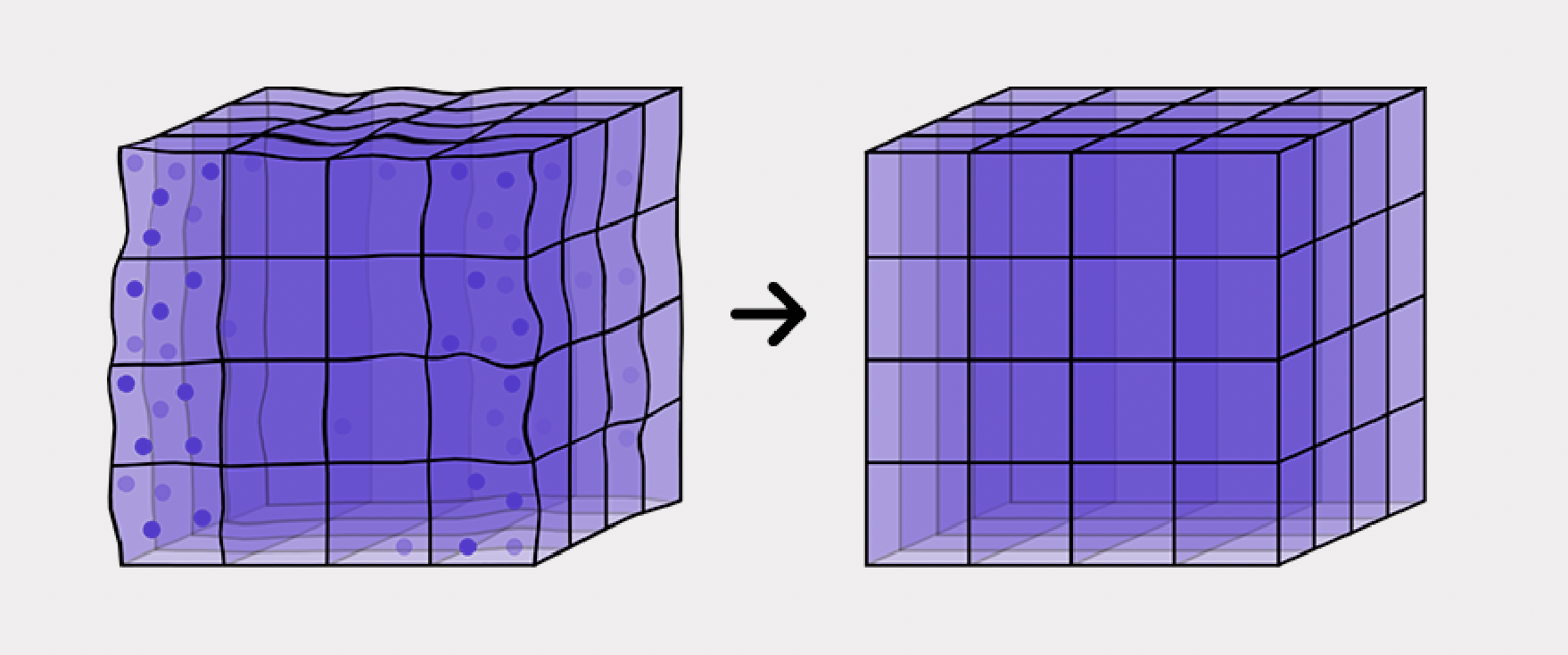
鏡頭畸變修正算法使圖像準確還原
客服熱線
[email protected]媒體聯系&數據合作
[email protected]集團投訴與舉報
北京市海淀區建材城中路27號金隅智造工場N7號樓2層

公眾號

視頻號
感謝您對G7易流的關注,我們會盡快與您聯系。
感謝您對G7的關注,我們會盡快與您聯系!

